Apicoo Robotics FITGRIP30 Manuale utente

FITGRIP30 User Manual

APICOO ROBOTICS –FitGrip30 User Manual
Notes before purchasing
1. A gripping solution built from FitGrip30 can ONLY work with objects that have similar size in
a task. FitGrip30 is suitable for repetitive tasks where the object’s sizes are similar. This modular
gripper FitGrip30 is not recommended for applications where sizes of objects are varied.
2. External gripping solution is not possible with FitGrip30.
3. FitGrip30 will be at OPEN state when POWER is OFF
FitGrip30 is different from traditional grippers that are popular in market, read the manual carefully
before purchasing the product.

APICOO ROBOTICS –FitGrip30 User Manual
Contents
I. Product description..............................................................................................................................................4
1. Recommended working area...........................................................................................................................5
2. Specification.....................................................................................................................................................7
3. Dimensions.......................................................................................................................................................8
II. How-to Use ..........................................................................................................................................................9
1. Mechanical interface .......................................................................................................................................9
2. Examples of building gripping solutions ........................................................................................................11
3. Electrical setup and control ...........................................................................................................................18
III. Fingertips .......................................................................................................................................................19
1. Basic fingertips...............................................................................................................................................19
2. Form-fit fingertip............................................................................................................................................21

APICOO ROBOTICS –FitGrip30 User Manual
I. Product description
Figure 1: FitGrip30 at OPEN and CLOSE states
FitGrip30 is a modular finger that can be used to build various customized gripping solutions. A
gripping solution can be composed of two or multiple FitGrip30s depending on size and shape of the
object that the users want to grasp. Examples showing different gripping solutions built from
FitGrip30 can be found in Chapter II.
NOTE: Always control the temperature of the gripper if required gripping force is higher than 25N
(equivalent to 8.6V applied voltage). Heat is the most serious problem with FitGrip30. At 8.6V supply
voltage, FitGrip30 can work with 100% duty cycle. When the force/applied voltage is higher, working
duty cycle is reduced.
Duty cycle is determined by: ON time/(ON time + OFF time). For example: gripper is actuated for
2 seconds, then off for 8 seconds. 2 sec ON / (2 Sec ON + 8 sec OFF) = 2/10 = 0.2 or 20% duty cycle
APICOO ROBOTICS –FitGrip30 User Manual
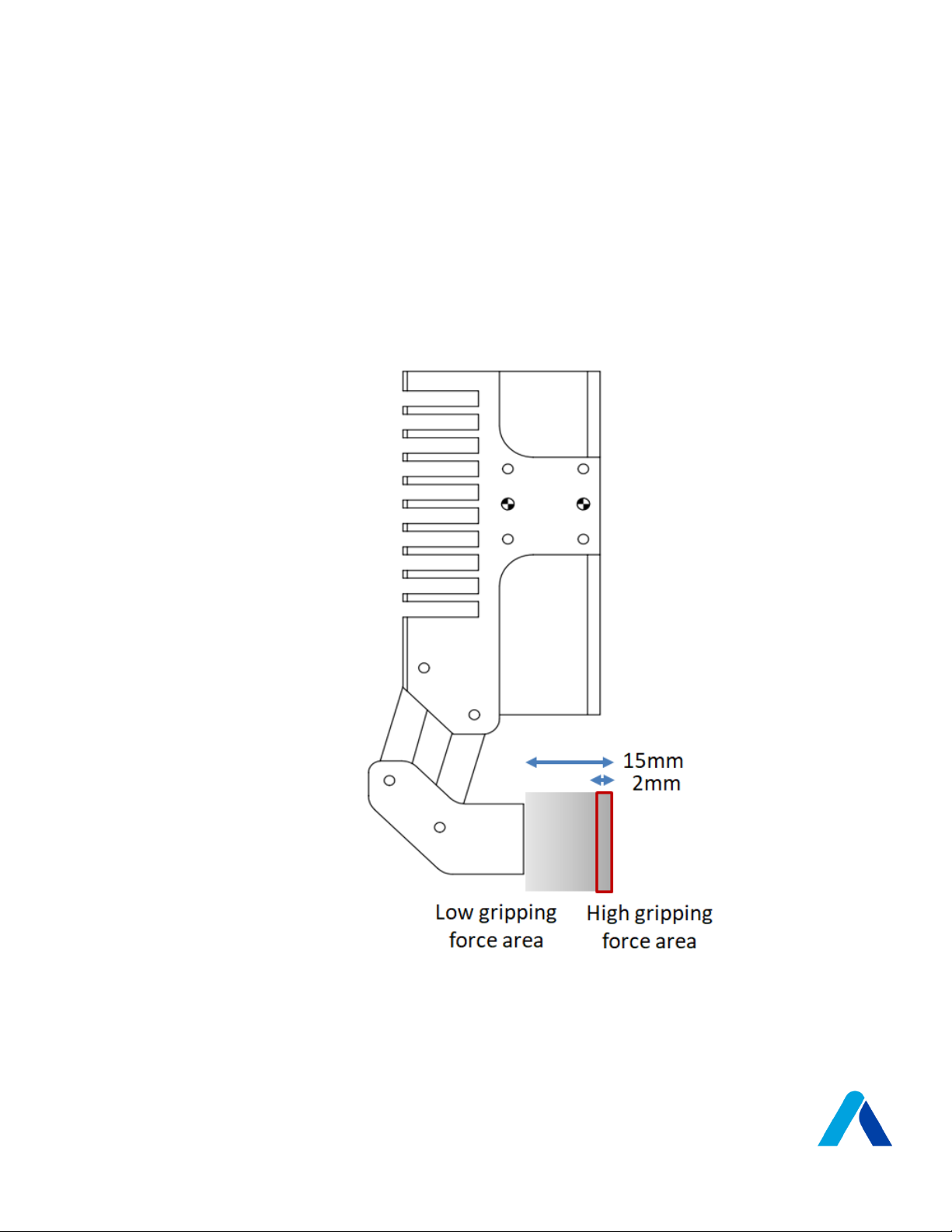
1. Recommended working area
Force is varied inside working area of the finger. The gripper starts with a very low gripping force
at beginning of stroke. The force is slightly increased when the stroke increases and is significantly
increased at the end of the stroke. Make sure that the fingertip contacts with the object inside the
recommended area which is at very end of the stroke. See Fig. 3 for relation between stroke and
gripping force of FitGrip30. Note that force will be reduced when temperature is increased.
Figure 2: Recommended working area of FitGrip30
APICOO ROBOTICS –FitGrip30 User Manual
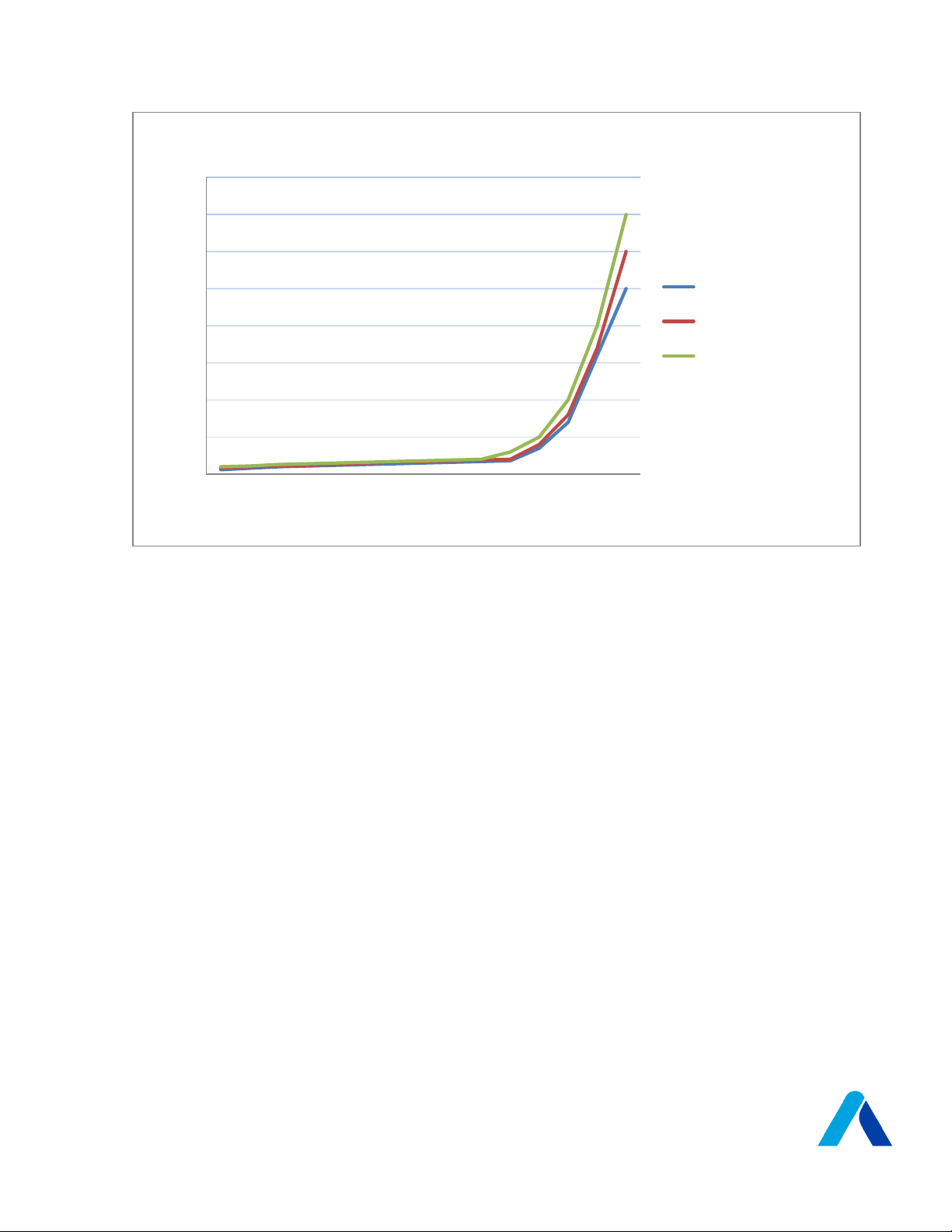
Figure 3: Stroke-force curve
Warning- Do the risk assessment carefully before performing a real task. Make sure that the
object is at center of the jaw of the fingers. Make sure that the gripping is performed at the end of
the stroke and the object is firmly gripped.
0
5
10
15
20
25
30
35
40
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Force (N)
Stroke(mm)
Stroke-Force Curve
8.6V(100% duty cycle)
10V(80% duty cycle)
15V(20% duty cycle)
APICOO ROBOTICS –FitGrip30 User Manual
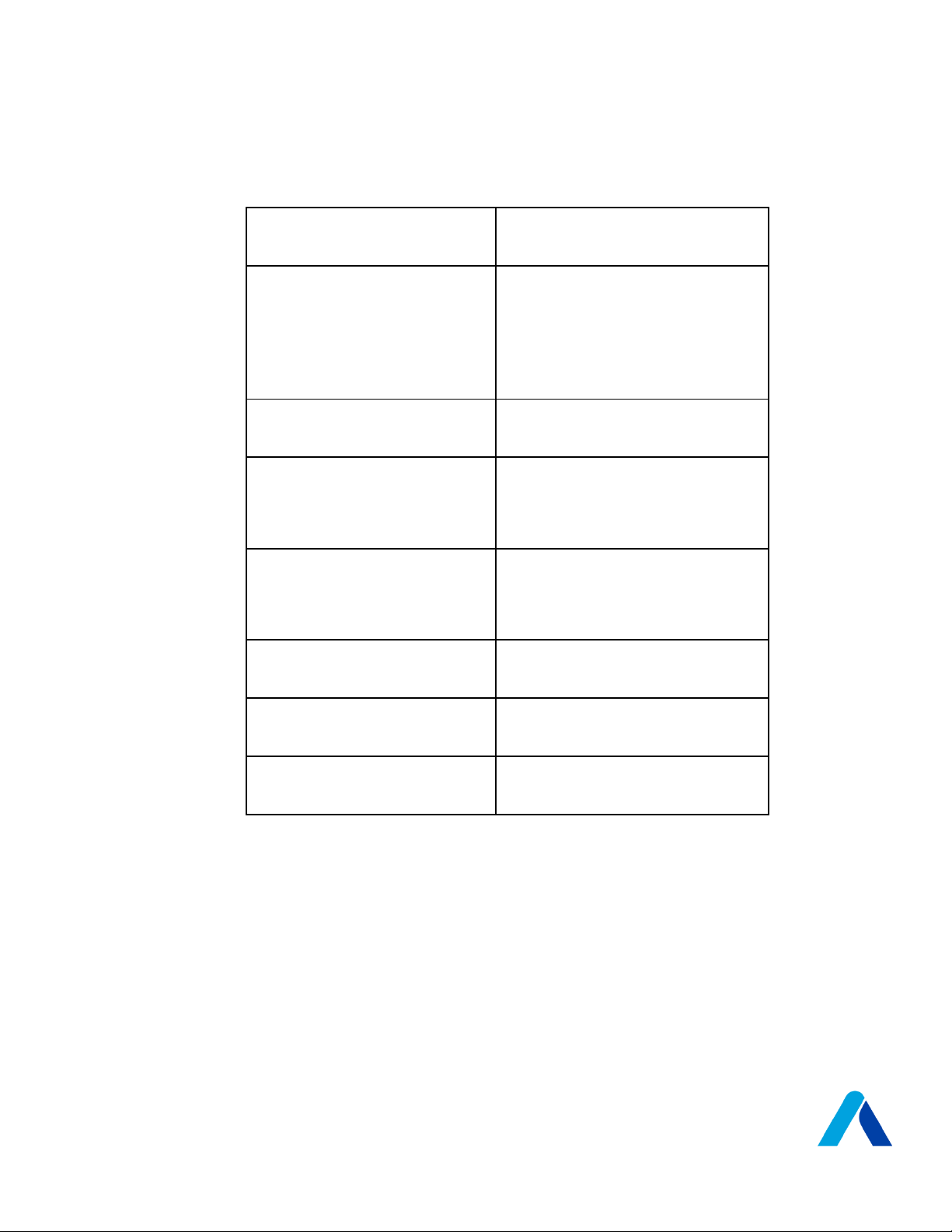
2. Specification
SPECIFICATION
VALUE
Gripping force
15-40 N
25 N at 100% duty cycle
30 N at 80% duty cycle
35 N at 20% duty cycle
Closing speed
<30ms
Form-fit Grip Payload
for 2-finger
configuration
5 kg
Frictional Grip payload
for 2-finger
configuration
2 kg
Weight
240 gr
Voltage
24 V DC
Size
129x47x25 mm
APICOO ROBOTICS –FitGrip30 User Manual
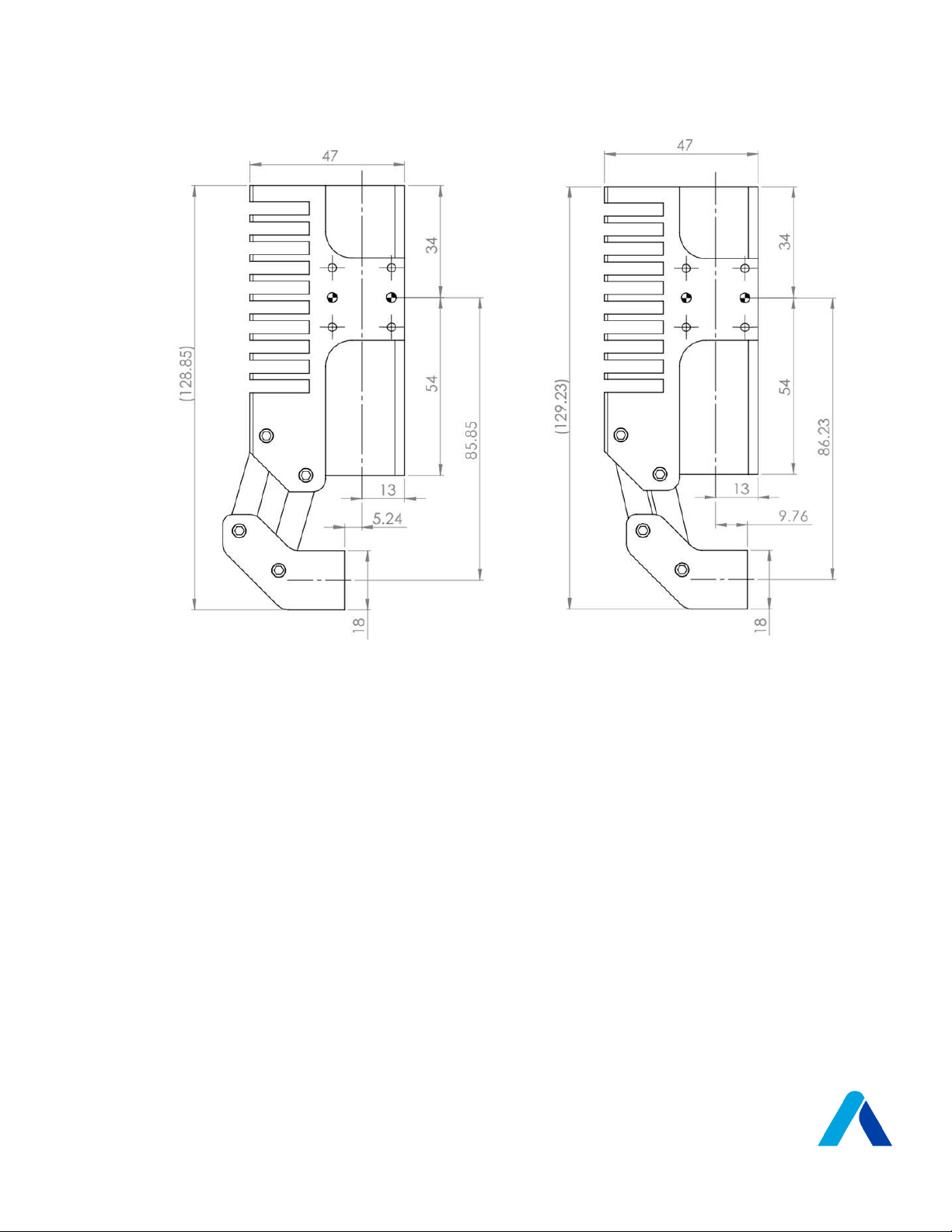
3. Dimensions
Figure 4: FitGrip30 at OPEN state

APICOO ROBOTICS –FitGrip30 User Manual
II. How-to Use
1. Mechanical interface
The mechanical interface is composed of 4x M3 thread holes and 2xΦ3 dowel holes as shown in
below figure. It is available in Font, Back and Up sides of the finger allowing users to build their own
customized gripping solution in many ways.
Figure 5: Mechanical interfaces are available in Font, Back, and Up sides of FitGrip30

APICOO ROBOTICS –FitGrip30 User Manual
Figure 6: Dimensions of mechanical interfaces
Indice

















