ATEAGO S1 Manuale utente

ATEAGO S1 Cleaning Robot User Manual
Version: 1.5.4s
Note: This document provides machine-related deployment procedures and precautions.
Follow the instructions in the document to avoid other abnormal situations when using
the machine in the future.

1
Introduction to Robots
Use environment requirements
Please use this product in accordance with the instructions of the manual.
Any loss caused by improper use shall be borne by the user.
Do not use in places with stairs or drops
There should not be a lot of black marble and black reflective cabinets at
the height of 27 cm
Do not travel on the ground with high friction: thicker and softer carpets
Do not use in a large amount of stagnant water and similar environments
There should be no densely placed thin-legged chairs in the travel area
Do not use in an environment above 50°C and below 0°C
Do not use on uneven and sloped roads
There are a lot of transparent glass and thin-legged tables and chairs,
which can be used depending on the construction of the map and the test
situation

2
Hardware parameters
Hardware parameters
Index performance
Product specification
Product Size
Length 684mm * Width 500mm * Height
600mm
product weight
80kg with packaging
Product color
white
product material
3D printed parts
Environmental
requirements
Storage temperature: -15°C~55°C; Working
temperature: 0°C ~ +50°C Humidity (RH):
10%~90%
Android specifications
operating system
Android 5.1
language support
Chinese
Processor type
RK3128
RAMLPDDDR3
1G
Built-inNAND FLASH
8GB
USB Debug port
Micro USBinterface
Display screen
7 inch, IPS screen (16:9) resolution 1024X600
External I/O port
1 USB 2.0 (MICROUSB), RJ45 network port
speaker
4Ω/3W Mono speaker

3
Wireless technology
AP6255
Support dual frequency 2.4&5G
WIFI 802.11b/g/n non-domain network cable
office
11ac 5.15GHz-5.825GHz
ROS Navigation specifications
operating system
LINUX
Lidar
Laser wavelength 905 nm, working area 270°
Single axis gyroscope
sensor
Yaw angle measurement
hard disk
32G high-speed solid state drive
motor driven
6.5 inch hub motor
Infrared sensor
Communicate with charging piles within 1
meter
512AN_HMW module Intel
WIFI
Support dual frequency 2.4&5G
WIFI&BT4.1 802.11b/g/n wireless LAN
11ac 5.15GHz-5.825GHz
Moving speed
Min 0.1 m/s, max0.5 m/s
Navigation board
Intel Core I5 motherboard
Remote function
Support remote navigation status monitoring,
remote online update navigation system
Light tube
UV lamp
16W

4
Water tank
Volume
15L
Power system
24V Rectifier
LPS-425-40A24U DC24V output power 48W
rectifier
Motor
Vacuum cleaner, solenoid water valve switch,
suction pump motor, roller motor
charging method
Automatic recharge, DC direct charge
adapter
enter:AC110-240V.50-60HZ
Output:DC43.2V-5A
Robot input power
42V--5A
battery
25AH lithium iron phosphate, 38.4V/960W
Charging pile parameters
Overcurrent protection, intelligent power off,
output rated voltage: 43.2VDC, output rated
current: 5A
Charging time
5.5-6 hour
Battery life
4-6 hour

5
Meet your robot
1. 7 inch display
2.3d camera
3. Lidar
4. Brush strip
5. Dust suction port
6. Driving wheel
7. Emergency stop switch
8. Infrared sensor
9. Automatic charging shrapnel
10. Absorbent sponge
11.Direct charging source hole
12. Ultrasound
13.Clean the sponge
14. Universal wheel
15. Trash box
16.Water tank
Cleaning precautions: ①Touch screen ③Laser navigation. Do not wipe
with a wet towel to avoid water ingress!
Precautions for use: ③Laser: Do not block the laser with objects
⑦Emergency stop switch: The emergency stop switch can only be rotated
to the right, do not rotate to the left

6
Use your robot
1. Boot
The power button is located on the base 11 on the back of the robot. It is a
button switch. Press it once to turn it on, and press and hold the power
button for 3 seconds to turn it off.
Note for shutdown: Press and hold the power button for 3 seconds, the
display will turn off the screen first, and then the motor will be powered off,
and finally the chassis light will go out!

7
2. Charging
Get to know your charger
The adapter plug needs to be plugged into the 110-220 V voltage, and the
DC head is plugged into the automatic charging pile. At this time, the green
light of the charging pile will be on, indicating that it is ready to charge.
Automatic charging: the robot can automatically detect the power and
charge automatically when the power is lower than the set threshold
(prerequisite: it is necessary to build a good map to mark the point of the
charging pile, the calibration method is as follows)

8
Direct charging: plug the power adapter cable into the power supply on the
back of the robot
Automatic charging hardware description
Placement of charging pile
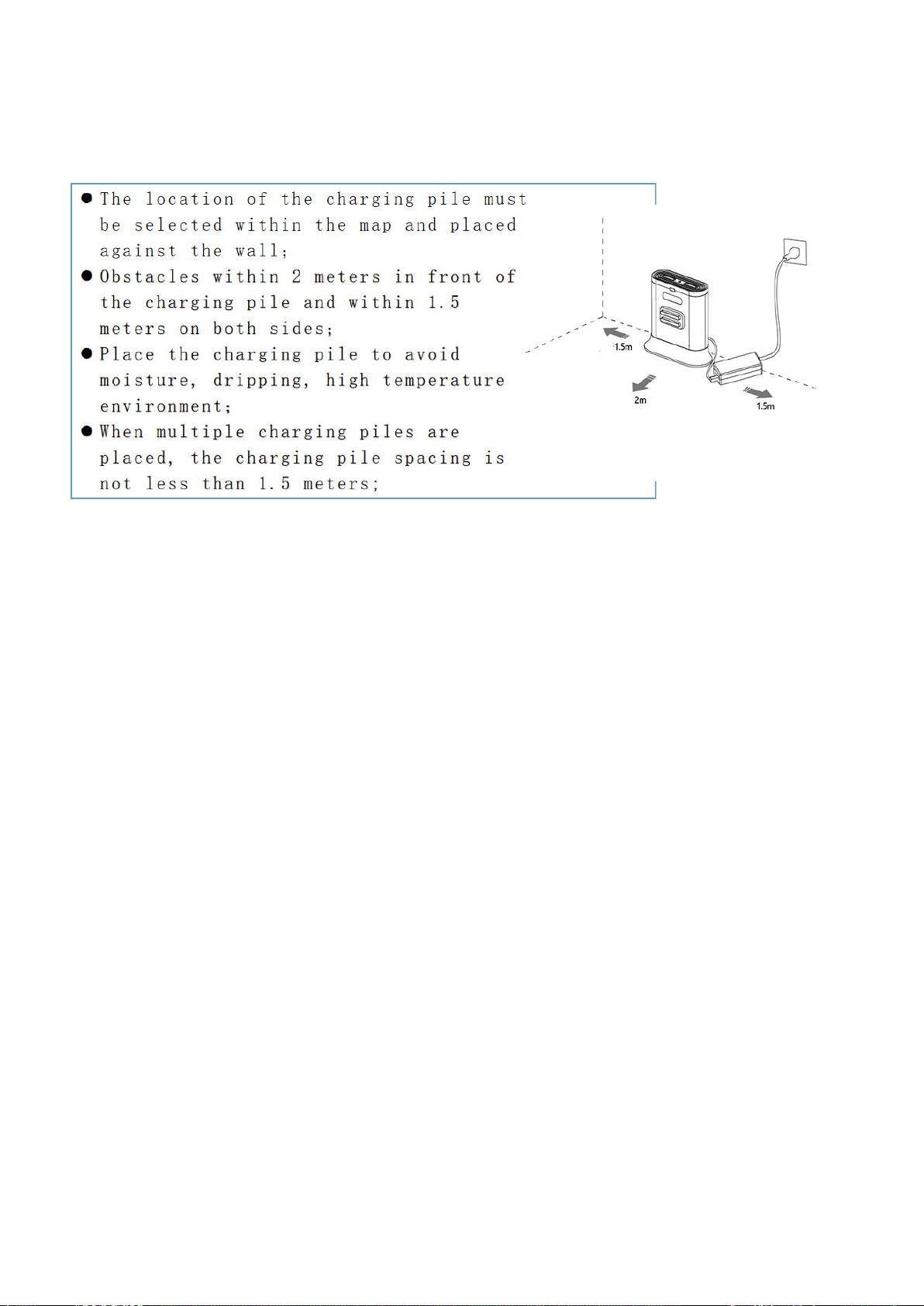
9
Notes on the selection of charging pile location
3. Navigation
Note:The following content is an introduction to all the functions of the robot
deployment background. The functions that must be operated are as shown
in the points 1, 2, 3, 4 and 5 in the following figure. Other functions depend
on the specific scenarios and usage conditions.
Indice

















