messtechnik gmbh
3
Inhalt
Important instructions: ...................................................................................................4
1. Preliminaries ...............................................................................................................5
2. Applicability and instructions for use ..........................................................................5
3. Description and functionality of the device ...............................................................6
3.1 Torsional shaft .....................................................................................................6
3.2 Enclosure .............................................................................................................6
3.3 Principle of operation .........................................................................................6
3.4 Disturbances and their compensation.................................................................7
4. Conditions on location ................................................................................................ 8
4.1 Ambient temperature..........................................................................................8
4.2 Moisture and dust................................................................................................8
4.3 Chemical effects...................................................................................................8
4.4 Deposits ..............................................................................................................8
5. Mechanical installation................................................................................................9
5.1 Precautions to be taken when assembling the transducer..................................9
5.2 General assembly guidelines ...............................................................................9
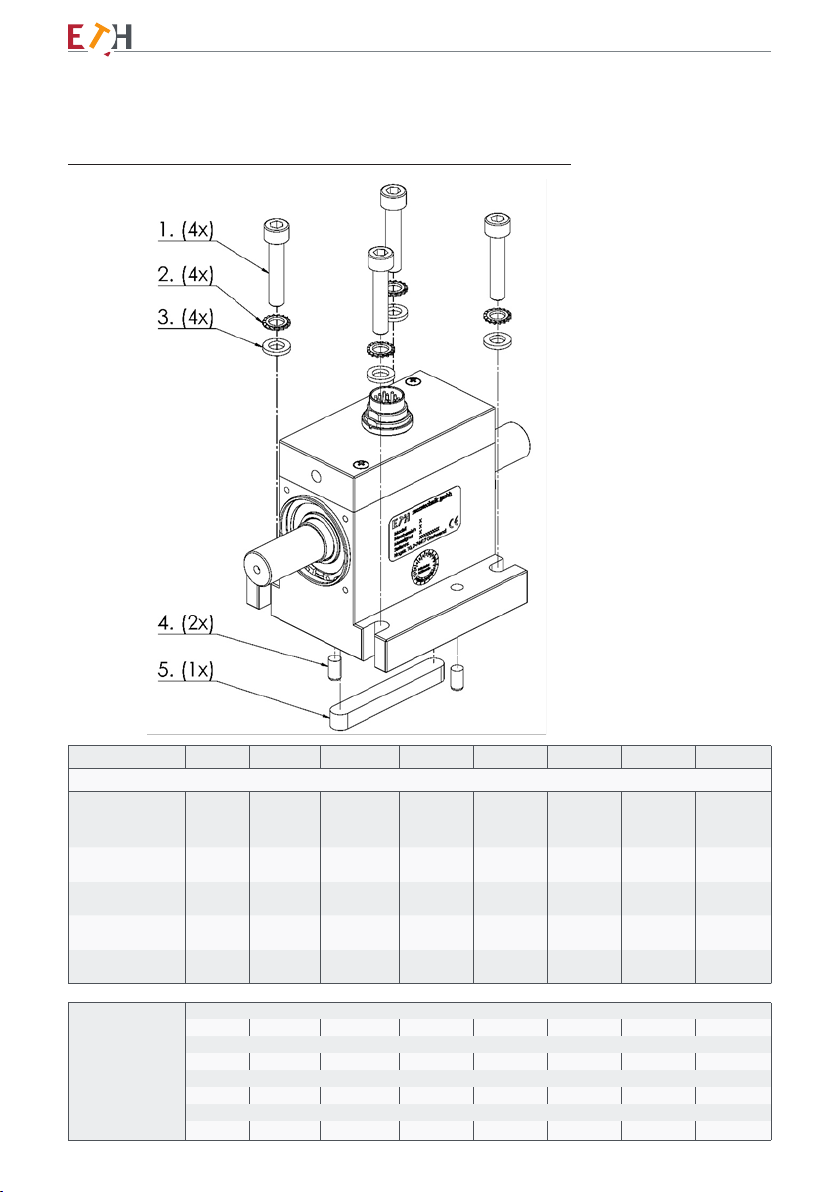
5.3 Additional parts and suggested values for the installation .....................................10
6. The measurement-chain setup..................................................................................11
7. Electrical connection .................................................................................................12
7.1 Wiring instructions.............................................................................................13
7.2 Connectors.........................................................................................................13
7.3 Pin assignment for the connectors ....................................................................14
7.4 Control activation ..............................................................................................14
7.5 Extension cables ................................................................................................14
7.6 The power supply ..............................................................................................14
8. Pin assignment .........................................................................................................15
8.1 DRVL standard cable ..........................................................................................15
8.2 DRVL robot cable ...............................................................................................16
9. Measurement outputs ..............................................................................................17
10. Recalibration............................................................................................................17
11. Disposal ...................................................................................................................17
12. Datasheet DRVL.......................................................................................................18
12.1 Electrical Specifications....................................................................................18
12.2 Mechanical Dimensions DRVL-F.......................................................................19
12.3 Technical Specifications DRVL ..........................................................................20