Receiver Type u-blox M8 high precision GNSS modules (M8P)
Satellite Constellation GPS L1C/A, GLONASS L1OF, BeiDou B1I
Positioning accuracy 3D FIX: 2.5 m / RTK: 0.025 m
Processor STM32F302
IMU sensor ICM20948
Navigation Update Rate Max: 8Hz
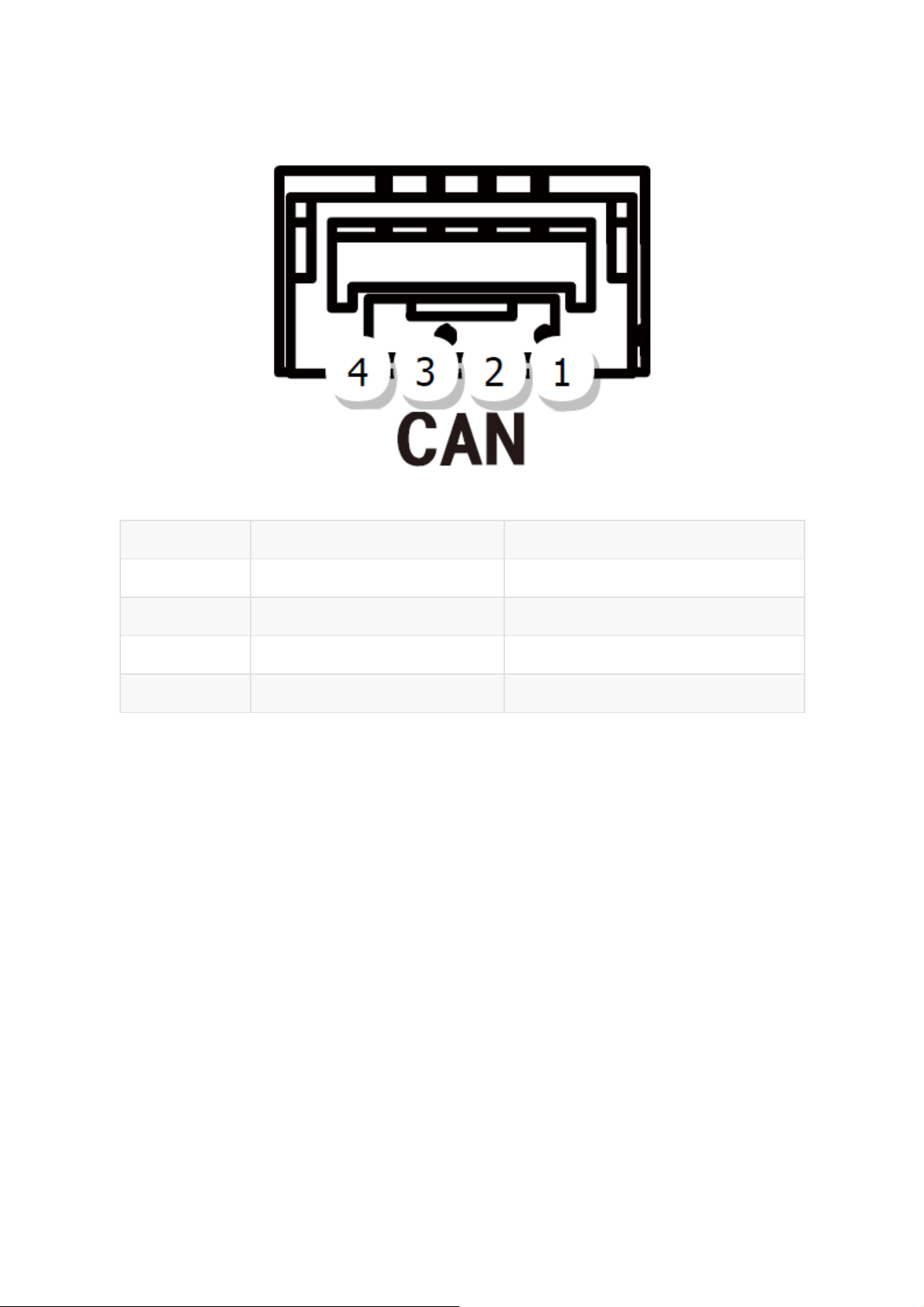
Communication Protocol CAN
Operating Temperature -40℃ to 85℃
Dimension 76mmx76mmx16.6mm
Weight 48.8g
Here3 GPS Manual
Overview
The Here3 GPS is a high precision GNSS system that supports RTK mode, built with CAN protocol.
It is also designed to be dust-proof and splash proof up to a certain limit. Equipped with
STM32F302 processor, the Here3 provides faster processing speed and better reliability.
The Here3 has built-in sensors including compass, gyroscope, accelerometer, and status LED. It
runs on Chibios real-time operation system. Its open source structure is ideally suited to
developers who need specialized requirements on their navigation system.
Feature
1. Cost efficient high precision and RTK supported GNSS chip (base station needed for RTK).
Positioning accuracy down to centimetre-level in an ideal environment.
2. Brand new design with improved visibility on signal LEDs. Better dust and water resistance
(No guarentee to be water proof under any situation due to complexity of operation
environment).
3. High data rate, upgradeability, noise immunity, and real-time features benefited from CAN
protocol
4. Equipped with STM32F302 high-performance processor in real-time operation system.
Framework developed by Hex provides additional stabilities. Supports future firmware
updates.
5. Support from ground control software. Future updates will be available from Mission
Planner.
6. Built-in a complete set of Inertial Measurement Unit (compass, gyroscope, and
accelerometer), which satisfy advanced navigation needs.
Specification