RS-Helios-1610 User Manual
Content
1 Safety Notices..............................................................................................................................................................1
2 Helios Series Products .............................................................................................................................................. 2
3 Product Appearance and Interface...................................................................................................................... 3
3.1 Product Appearance.................................................................................................................................... 3
3.2 Aviation Plug and Pin Definition.............................................................................................................. 3
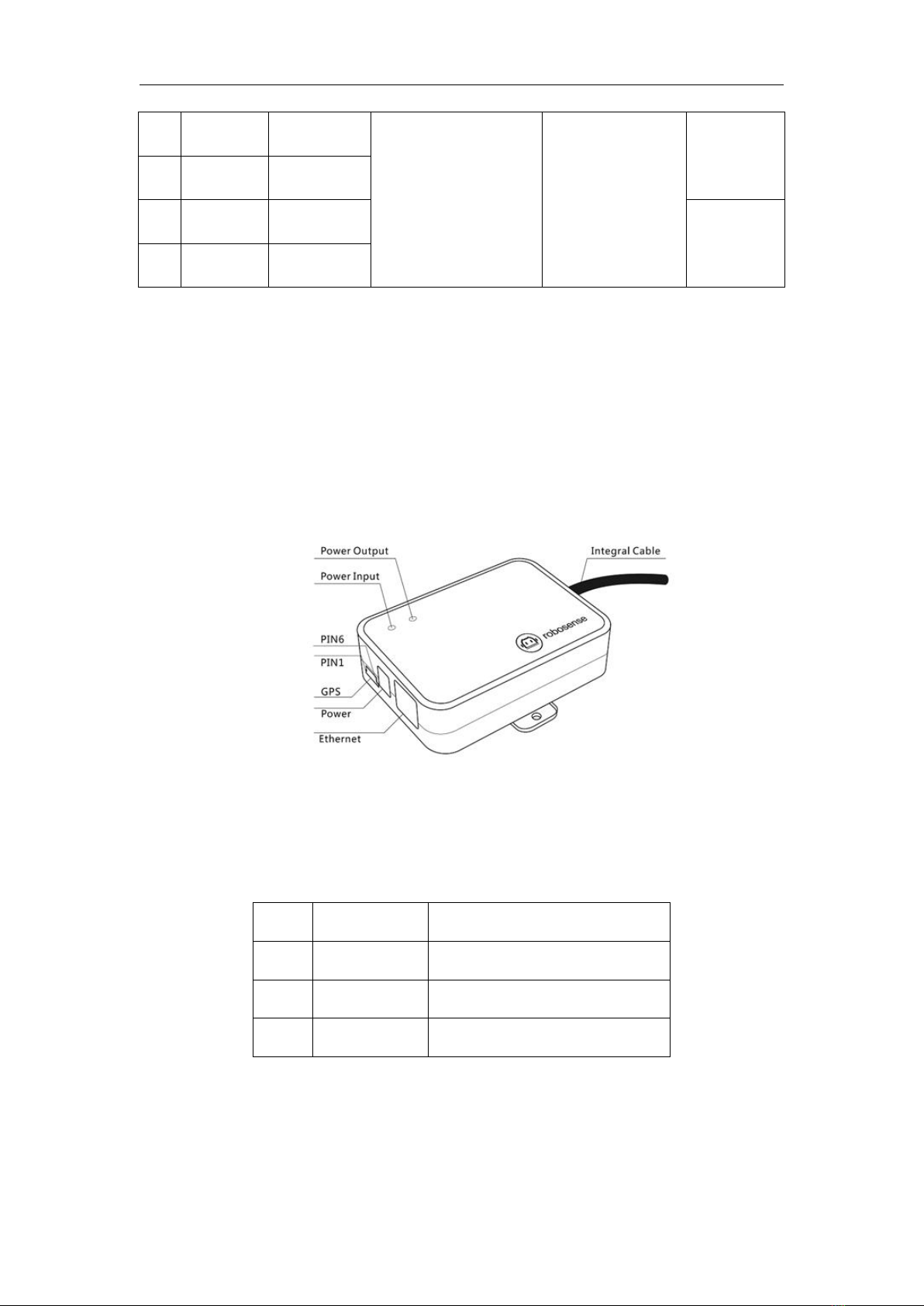
3.3 Interface Box...................................................................................................................................................4
4 Unboxing & Installation............................................................................................................................................6
4.1 Standard Package ..........................................................................................................................................6
4.2 Sensor Mounting...........................................................................................................................................6
4.3 Quick Connection ..........................................................................................................................................8
5 Sensor Specifications and Features...................................................................................................................10
5.1 Sensor Specification..................................................................................................................................10
5.1.1 Parameters......................................................................................................................................10
5.2 Point Cloud Display....................................................................................................................................12
5.2.1 Coordinate Mapping....................................................................................................................12
5.3 Reflectivity....................................................................................................................................................12
5.4 Laser Return Modes .................................................................................................................................. 13
5.4.1 Principle of Laser Return Modes............................................................................................. 13
5.4.2 Return Mode Flag.........................................................................................................................14
5.5 Phase Locking.............................................................................................................................................. 14
5.6 Time Synchronization............................................................................................................................... 15
5.6.1 GPS Time Synchronization.........................................................................................................15
5.6.2 The Use of GPS for Time Synchronization............................................................................15
5.6.3 PTP Time Synchronization......................................................................................................... 16
5.6.4 PTP wiring Method.......................................................................................................................17
6 Communication Protocol...................................................................................................................................... 17
6.1 MSOP and DIFOP........................................................................................................................................18
6.2 Main Data Stream Output Protocol(MSOP)............................................................................... 18
6.2.1 Header ..............................................................................................................................................18
6.2.2 Data Blocks......................................................................................................................................19
6.2.3 Tail......................................................................................................................................................21
6.3 Device Info Output Protocol(DIFOP).............................................................................................22
7 Vertical Angles and Precision Point Timing Calculation ..............................................................................24
7.1 Channel Number and Vertical Angle ................................................................................................... 24
7.2 Exact Point Timing Calculation.............................................................................................................. 24
8 Troubleshooting ....................................................................................................................................................... 26
Appendix A Web Interface....................................................................................................................................... 28
A.1 Device Screen..............................................................................................................................................28
A.2 Web Interface for Sensor Setting ......................................................................................................... 28
A.3 Diagnostic Screen ...................................................................................................................................... 31
A.4 System Screen.............................................................................................................................................32
Appendix B Information Registers.........................................................................................................................34